题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
下列哪种定义可以从狭义上界定机器人()。
A.外形像人
B.不需要人类协助
C.全自动
D.自动机器
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.外形像人
B.不需要人类协助
C.全自动
D.自动机器
答案
 更多“下列哪种定义可以从狭义上界定机器人()。”相关的问题
更多“下列哪种定义可以从狭义上界定机器人()。”相关的问题
第1题
第2题
根据上述定义,下列没有凸显情感价值链的是()。
A.小张从事美容工作多年,她总是专注而耐心地倾听客户说话,让客户在享受按摩的同时心情舒畅
B.智能音箱“小美”深受孩子们喜爱,因为它不仅能播放儿歌和故事,还能跟小朋友“对话、握手和点头”
C.电视上,一对年轻夫妻为“该谁扫地了”而犯愁,之后扫地机器人登场,并闪现广告语“有了它,更幸福”
D.洗碗机广告中,一位女士愁眉苦脸刷着油腻的碗盘,看着自己粗糙的双手,广告词是“你要做这样的女人吗?”
第3题
试题三(共15分)
阅读下列说明和图,回答问题1至问题3,将解答填入答题纸的对应栏内。
【说明】
某软件公司欲设计实现一个虚拟世界仿真系统。系统中的虚拟世界用于模拟现实世界中的不同环境(由用户设置并创建),用户通过操作仿真系统中的1~2个机器人来探索虚拟世界。机器人维护着两个变量b1和b2,用来保存从虚拟世界中读取的字符。
该系统的主要功能描述如下:
(1)机器人探索虚拟世界(RunRobots)。用户使用编辑器(Editor)编写文件以设置想要模拟的环境,将文件导入系统(LoadFile)从而在仿真系统中建立虚拟世界(SetupWorld)。机器人在虚拟世界中的行为也在文件中进行定义,建立机器人的探索行为程序(SetupProgram)。机器人在虚拟世界中探索时(RunProgram),有2种运行模式:
①自动控制(Run):事先编排好机器人的动作序列(指令(Instruction)),执行指令,使机器人可以连续动作。若干条指令构成机器人的指令集(InstructionSet)。
②单步控制(Step):自动控制方式的一种特殊形式,只执行指定指令中的一个动作。
(2)手动控制机器人(ManipulateRobots)。选定1个机器人后(SelectRobot),可以采用手动方式控制它。手动控制有4种方式:
①Move:机器人朝着正前方移动一个交叉点。
②Left:机器人原地沿逆时针方向旋转90度。
③Read:机器人读取其所在位置的字符,并将这个字符的值赋给b1;如果这个位置上没有字符,则不改变b1的当前值。
④Write:将b1中的字符写入机器人当前所在的位置,如果这个位置上已经有字符,该字符的值将会被b1的值替代。如果这时b1没有值,即在执行Write动作之前没有执行过任何Read动作,那么需要提示用户相应的错误信息(ShowErrors)。
手动控制与单步控制的区别在于,单步控制时执行的是指令中的动作,只有一种控制方式,即执行下个动作;而手动控制时有4种动作。
现采用面向对象方法设计并实现该仿真系统,得到如图3-1所示的用例图和图3-2所示的初始类图。图3-2中的类“Interpreter”和“Parser”用于解析描述虚拟世界的文件以及机器人行为文件中的指令集。
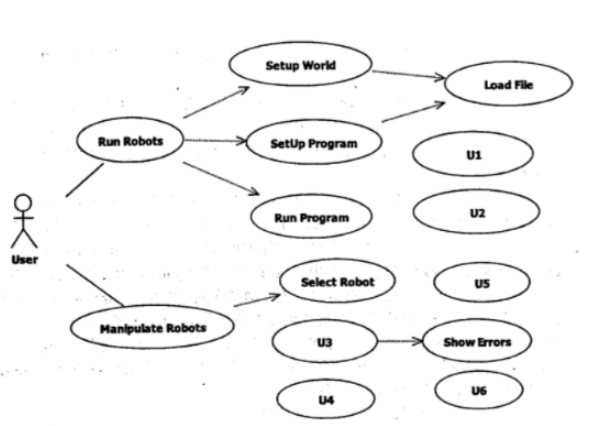
图3-1用例图
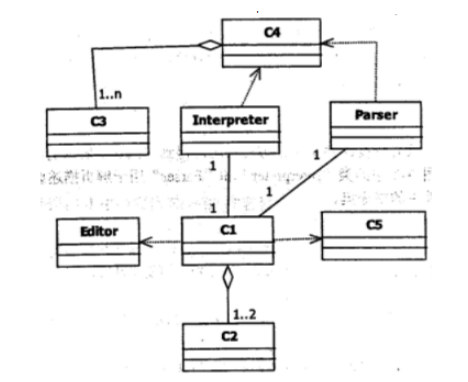
图3-4初始类图
【问题1】(6分)
根据说明中的描述,给出图3-1中U1~U6所对应的用例名。
【问题2】(4分)
图3-1中用例U1~U6分别与哪个(哪些)用例之间有关系,是何种关系?
【问题3】(5分)
根据说明中的描述,给出图3-2中C1~C5所对应的类名。
第4题
A.市场是商品经济的范畴,它随着商品交换的产生而产生,并随看商品交换的发展而发展
B.从广义上讲,市场是指商品交换的场所
C.从狭义上讲,市场是商品交换关系的总和
D.市场由市场主体和市场客体构成
第5题
B.从狭义上讲,文化市场是指文化商品和服务在交换过程中所发生的各种关系的总和,体现看文化商品和服务的生产者、经莒者、消费者、决策者之间,及不同文化生产资料所有者之间的相互关系
C.在整顿、规范文化市场秩序时,我们一般指的是狭义上的文化市场
D.在制定文化市场政策法规时,我们一般指的是广义上的文化市场
第6题
A.广义的工作分析与狭义的工作分析是从客体分布范围上划分的
B.广义的工作分析,是对整个国家与社会范围内岗位工作的分析
C.狭义的工作分析,是对某一企事业组织内部各岗位工作的分析
D.广义的工作分析,是对某一企事业组织内部各岗位工作的分析
第9题
原型定义的属性中,确保需求没有逻辑上的矛盾是下列哪种属性?
A.一致性
B.完备性
C.可维护性
D.非冗余性