题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
Processing可以通过坐标系的变换实现动画效果,下列函数描述不正确的是:()。
A.pushMatrix()将当前的视图矩阵压入堆栈,保存坐标系。
B.popMatrix()将视图矩阵弹出堆栈,恢复原先的坐标系。
C.translate(x, y)将原点由(0,0)移动到(x,y)处。
D.rotate(angle)绕原点顺时针旋转。
 答案
答案
查看答案
 请输入或粘贴题目内容
搜题
请输入或粘贴题目内容
搜题
 拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
拍照、语音搜题,请扫码下载APP
题目内容
(请给出正确答案)
A.pushMatrix()将当前的视图矩阵压入堆栈,保存坐标系。
B.popMatrix()将视图矩阵弹出堆栈,恢复原先的坐标系。
C.translate(x, y)将原点由(0,0)移动到(x,y)处。
D.rotate(angle)绕原点顺时针旋转。
答案
 更多“Processing可以通过坐标系的变换实现动画效果,下列函数描述不正确的是:()。”相关的问题
更多“Processing可以通过坐标系的变换实现动画效果,下列函数描述不正确的是:()。”相关的问题
第1题
A.建立微元体的水平平衡方程和竖直平衡方程推导出来的
B.建立微元体的径向平衡方程和环向平衡方程推导出来的
C.可将直角坐标系下平衡方程通过坐标变换推导出来
D.建立矩形单元的径向平衡方程和环向平衡方程推导出来的
第3题
设新旧坐标系都是右手直角坐标系,点的坐标变换公式为
(1)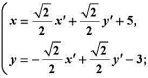
(2)
其中,(x,y)与(x',y')分别表示同一点的旧坐标与新坐标,求新坐标系的原点的旧坐标,并且求坐标轴旋转的角θ.
第4题
在右手直角坐标系σ1={O;e1,e2,e3}中,已给三个互相垂直的平面 :x+y+z-1=0,
:x+y+z-1=0, :x-z+1=0,
:x-z+1=0, :x-2y+z+2=0.确定新的坐标系
:x-2y+z+2=0.确定新的坐标系 ,使得,,分别为
,使得,,分别为 坐标面,且O在新坐标系的第一卦限内,求σ1到σ2的点的坐标变换公式.
坐标面,且O在新坐标系的第一卦限内,求σ1到σ2的点的坐标变换公式.
第7题
A.前移式叉车
B.插腿式叉车
C.集装箱式叉车
D.平衡重式叉车
第8题
A.变换前后A,B,C各点电压与通过A,B,C三点的电流成正比
B.变换前后A,B,C三点之间的电压与通过A,B,C三点的电流保持不变
C.变换前后A,B,C三点之间的电阻与通过A,B,C三点的电流保持不变
D.变换前后A,B,C三点之间的电压与通过A,B,C三点的电流成反比
第9题
●JPEG图像编码标准可以支持(32)格式,其有损编码的核心算法是(33),无损编码模式的核心算法是(34)。我们在图像处理软件中将图像另存为JPEG格式时,通常可以选择图像的重构质量,这是在编码过程中通过(35)环节进行调节的。
(32)A.真彩色图像和伪彩色图像
B.伪彩色图像和灰度图像
C.灰度图像和黑白二值图像
D.真彩色图像和灰度图像
(33)A.DCT
B.DPCM
C.RLE
D.LZW
(34)A.DCT
B.DPCM
C.RLE
D.LZW
(35)A.图像分块
B.变换编码
C.系数量化
D.熵编码